
原标题:高通公司高级技术标准总监李俨博士:关于5G的移动车联网 (C-V2X)技术解析 近日,美国高
原标题:高通公司高级技术标准总监李俨博士:关于5G的移动车联网 (C-V2X)技术解析
近日,美国高通公司高级技术标准总监、未来移动通讯论坛车联网工作组主席李俨博士进行了《通往5G之路:移动车联网 (C-V2X)技术解析》的分享,以下是其演讲原文:
李俨:高通是CDMA移动通信技术的创始人。在2012年前后全球开始做4G、中国4G还不是特别清晰的时候,高通决定在中国推动移动技术,让LTE终端在中国能实现最早的落地,其中有一个很重要的领域,就是汽车。尤其是整个移动通信在汽车领域的结合作用开始逐渐的显现。到2014年、2015年前后,高通推动了汽车上面的通信技术,主要是从安全角度考虑,如紧急呼救等,来解决主动式安全。
从通讯的角度去看,我们要思考的是如何将通讯跟汽车结合,帮助汽车做到更加安全和智能。我认为,我们应该通过相互的协作、沟通把跨行业的工作做起来。
今天重点谈的就是C-V2X,连接的能力。整个产业如今正在往连接性,智能性,电气化,共享性这几个方向发展。通过网联技术的发展,人工智能的发展,新的电气化的发展,把整个汽车产业向外扩展,希望让交通变得更加环保和安全。
国家角度来讲,也希望利用汽车行业大的变革,实现弯道超车,尽快赶上国际更高水平。事实上,我们国家网联和智能化的战略也十分清晰,这也为车企带来了新的机会。
智能网联汽车六个字,是三个维度。汽车是在电气化维度发展,人工智能也在自己的维度发展,通信也在自己的维度发展。现在大家用的手机都是4G,再过两年5G就要来了。2G、3G、4G都是以人为中心,2G是打电话,3G是在打电话的基础上把数据带到了智能手机上,4G是针对数据优化的网络。

而5G更加关注的是行业,针对物联网的应用做了很多扩展。以后人为中心是一部分,物为中心是另外一部分,针对这样的需求5G做了很多扩展,除了增强型移动宽带外上网速度更快,这部分实际上主要是针对以人为中心的应用的进一步发展。
今天我们上网可能是很快了,在4G上能够达到一个GB的下载速度,但是这个峰值速率并不是普遍的。到5G的时候,几乎在任何时候大家都能看到几百兆,甚至是一个GB的连接体验。
物联网的应用,还会继续向前演进。不仅把所有的路灯都连上,把每个井盖都连上,我们要让所有开车的人都知道某一个地方有没有井盖,让每一个对经济社会能产生影响的节点都有通信能力。
另外一点要谈下关键型技术,一些低时延,高可靠的技术要求应怎么优化?需要我们通讯能力非常可靠。如果仅仅基于通讯能力,汽车是一个可以杀人的工具,它一定要有绝对的安全和可靠性,要做到无论把它放在每一个值里都要可靠。这对通讯能力要求极高。
今天我们打电话掉线是不可避免的,大家都经历过,但是如果将来在车上通讯断了,是有可能出人命的。当我们把通讯能力放到车上的时候,安全性要做大量的优化。
另一个维度,智能性,今天讨论更多的就是车载智能计算。从整个人工智能决策体系来看,感知、决策、执行,这是一个完整的人工智能闭环。智能计算只是解决了控制,决策这个环节。决策是一定要来自于数据的,前期大量的数据要通过采集纳入到汽车里面。
今天的汽车里面除了要装各种各样的传感器,声光电,激光雷达,摄像头,毫米波,通过这些设备来采集很多数据。这些数据核心的目的是要形成动态地图,交给智能驾驶计算形成你的轨迹规划。
但是如果这些数据不完整,只有一个强化的大脑是没有用的,所以一定要强调感知的能力。
今天大家看的自动驾驶汽车都顶着一个大脑袋,站得高,看得远。但是站得再高,也会遇到问题的。如果旁边来了一个大卡车,很可能你什么东西都看不到。移动的感知能力需要扩展到视距以外,当被汽车挡住的物体快速向我过来的时候,我才可以通过二次雷达感知到。

实际上所有自动驾驶的核心是3D动态地图,高精度的动态地图。所有最后的决策,最终的感知是把所有的信息都放到高精度地图上。这个不仅仅包括传统静态的路,交通灯也要规划出来,当然也包括信号灯的变化。然后就是以我为中心的时候,周边都有哪些车辆,他们每个都是属于什么状态,这些都得弄到动态地图里面,才能做轨迹推演,决定要变道,还是刹车。
现在地图已经很准了,问题是,你能不能精确的知道你在地图里面的什么位置?所以定位也是汽车里面非常非常重要的感知手段,要推演到我到底是哪一个轨道上。可能有其他的传感器进来,或者我要根据摄像头来看道路,才能定位我到底在哪条道上。整个定位要做很多的推演,GPS定位等各方面的融合实现精准定位。这也是传统移动通讯公司所擅长的行业。
回来说V2X,我们相当于在车上装了电子的喇叭,我把我的情况说出来,我告诉别人我在哪里,这样就保证了不仅每一个人都知道我在地图上的哪里,我也知道别人在地图上什么位置。
接下来,我们要做的是不仅要告诉别人我在哪,还要告诉别人我去哪里,这是很重要的。如果说前方一公里你就要出去,你到了距离出口一公里的时候,邻行车道的车辆不一定会让你。车与车之间一定要协作,当我要出去的时候,我要告诉相邻的车我必须要出去,这是协助式的意图感知,只有这样将来的智能交通系统才能成立。
一辆车的能力做得再强,你只能一时半会上路开。但是大家都在路面上的时候,就需要用共同的路径规划了。这个时候就需要在系统级别上进行相互的意图传递,未来要真的做到智能交通的话就需要协作式的路径规划。
很多人谈到智能网联汽车的时候,说最终的目标是要把方向盘卸掉,车里没有司机。但是做人工智能的时候,所有的人工智能都会提到的,一定是决策的时候人要在里面,不能让机器完成所有的事情。如果说能让机器把事情全做了,这基本上是骗你的。如果汽车在环境里面出问题了,驾驶员都没有了,谁来参与决策?
比如说前方立交桥的路况处理不了,打个电话给救援中心,如果发生事故把车撞了,或是前面有一滩水不知道能够通过,因为车里有大量的传感器,我们可以把当前立体的VR形式把数据传回给呼叫中心,呼叫中心会帮你把车开出来,开到机器可以接管的地方,这既完成了自动驾驶这件事,也可以把司机给从驾驶位中拿出来了。

说到V2X很多都是谈人工智能,但是并不是要到了一定高度人工智能的时候,通信才有作用,实际上今天很多企业处于做人工智能的初级阶段,ADAS的时候已经做了很多传感器。很多车企曾考虑在这个时候就把这个作为解决感知问题的一个方式。解决了感知层面后,依旧把大量的信息提供给人,因为人在驾驶舱里面,人要更复杂。当然在某些具体环节可以取代人的能力。
刚才也提到了,感知层面是可以帮助我们做事的,很多车企今天就要把V2X放到车里面去,帮助驾驶员实现一些感知拓展。如果了解整个V2V发展的话,大家听到过几个概念,第一,Dsrc。这个概念什么时候提的?说起来有点远,是1999年提出来的。那时候WiFi都没有。那个时候美国人就想着,要给基础设施进行改变。每一个道钉都装上这个东西之后,道钉跟车之间就能够互动,告诉车辆应该往哪个方向走,这一点将来就可以做人工智能,可以避免很多危险。
这一观点提出来之后,确实得到了政府的支持,在1999年就分了75兆频率,叫做Dsrc的应用,这个频率一直留到现在还在用。当时在做的时候,想得很好。那时候还没有3G,最好的技术就是WiFi了。就拿WiFi来改,WiFi最开始做的时候是针对于大家都在办公室内外,不动的,在不动的技术上改,再怎么优化也不好,但是他们一直在努力。
不仅技术不好,命也不好。1999年诞生的它,在2000年就赶上互联网泡沫,美国说有钱的时候把它装到道钉上去,2000年以后就不提了,为什么呢?没钱。后来又开始在做,2010年做完以后,奥巴马希望用移动通信技术推动互联网重新动议,美国交通署把件事翻出来,重新成立项目,叫做Mcity,M就是密西根。它做了一个封闭环境和公开环境,封闭环境就是很小,几十亩地的一个区域,做了很多工况的环境,也做了很多网联的技术。
密西根大学是东西校区的,两个校区之间有车辆,他们装了2860辆车,装上去之后就跑了两年,收集了几十万小时的数据。然后就说很多交通事故是可以避免的,甚至有84%的交通事故如果有提前的预警是可以避免的。从2015年开始,奥巴马每两个月就会写一篇推荐V2X的技术、车联网的文章,把它炒热。他希望通过车和车之间的强制安装,把交通事故下降到1/7。
但这有一个劣势,WiFi如果信号不好,大家谁也上不了网。这时候把WiFi放到车上的话,信号不好的时候谁也抢不到资源,发不出声音的。而且这毕竟是一个静止不动的版本,虽然做了很多优化,但是装到车上以100公里每小时的速度跑的时候,还是不灵动。虽然高通做了很多大量算法的优化,但是可靠性还不是特别好。

另外,这个技术太老了,所以性能也不怎么好,工作距离比较短,这也造成给它的一些应用有局限。做移动通讯的优化是高通的强化,今天可以在高铁上打电话,是在LTE的情况下改,生成新的技术,这方面中国是很有创新精神的。一直到今年6月份我们完成了标准。
C是蜂窝的意思,我们专门做移动通信的,所以管自己叫做蜂窝通信。V,是LTEV。这个是标准之前用的名字,现在是V2X。在去年年底做得差不多的时候,5G出来了,我们要有一个前瞻性。所以大家就在想,在商业推广上,我们就把这个叫做C-V2X。
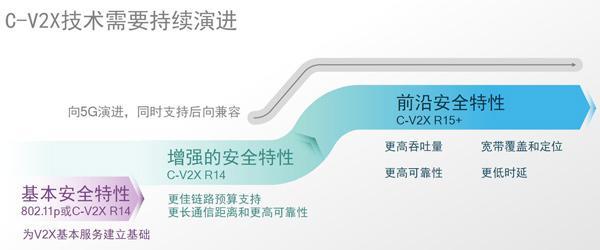
我们可以把5G纳入到整个体系里面去。R14的对标就是11p,11p能做的事情它都能做,除此之外还有很多其他的特性,要做得更可靠,通信距离更远,甚至做到上到云端的能力,所以V2X有更广的安全拓展的特性。再往后走,我们在R15和R16开始做。
11p跟它对标的时候,传的信息很少,就是在哪,位置、方向,速度这些信息。但是,未来我们需要更高带宽支持自动驾驶。今天很多人都在说很炫的例子,前面一辆大卡车在开,后面几辆车在走,他们编组行进。这个时候在R15往上做一些优化。
另外他们还有另外一些思路,说往自动驾驶车里面装传感器,激光雷达装十几个,摄像头装12个,激光雷达到现在为止还是很贵的,这个车怎么商用呢?科学家说社会上总会有一些有钱人,可以给他把所有的传感器都装上,他会很精确的把周围情况都感知到。站的高,看清楚周围所有的车辆后广播出来,其他的车就不需要开雷达,只要听就好了。
将来有了这种模式之后,有钱的人可以去听,去看,然后把看到的东西说出来,其他人就只要简单装一些摄像头,简单看一些基本的情况就可以了。然后一融合,一对比就可以形成可靠的数据供驾驶使用,通过这种方式可以大幅度降低人工驾驶进入市场的成本。
所以需要“有钱人”把看到的东西播出来,快速、实时的播出来,整个未来的R15、R16是针对这些功能来做的。安全,防碰撞还是R14为主。这绝不是说5G的东西出来之后会把它替代掉,这个跟做移动通信不一样。这个是一个长期演进存在的过程。
未来要在增加技术的同时提供额外的功能。就像我们今天车里装了摄像头之后,还要装雷达,二者是补充关系,而不是替代关系。不是说5G快来了,就要等5G,现在就不研究了。此时此刻,车企就可以通过做V2X解决基础安全性应用。
在未来一到一年半里面业界争论核心的点就是,我们一定要想办法把别人跟你说的内容映射出来。我有一个基站,车和车之间的通信是怎么用的?要广播出来,让所有人去听。这个是一个经过网络绕转的,所有在没有网络覆盖的时候,V2V是不通的。
这个问题就是时延比较大,一上一下,这个时延能不能解决安全性的应用,因为防碰撞的时候,要提前三四秒的预警,如果通信占到两秒,可用性就大大打折扣了。V2X,就是手机跟网络的接口,有了这个接口是很好的事,因为将来有了它可以上云端实时下载地图的信息。如果解决动态分几层,地图基本不动,或者一个月内不动的信息,通过U口下载是没有问题的。但是你要非常动态的话,车和车级别的动态,通过它不一定可靠,这是业界综合最大的焦点。
这里面的核心是替代基站,而且沿着马路盖基站,车企觉得不能为了做自动驾驶和感知给运营商付更多的钱,而且也付不起。任何人都是说我说别人听就好了,车也可以说,信号灯也可以说,行人也可以说,用同样的语言去说。
信号灯说还有15秒钟,别急着过来,慢点开。前车马上要紧急刹车,我的预警距离还够不够?虽然前面还没有看到刹车灯亮起来,但是我要提前预警。这个也有两种派系,PC5里面就一个叫做模式3和模式4,模式4是车和车自己选择设备和资源,我想说的时候听一下哪个资源空的就挑出来。
模式3的话,设备商出来说你们不能随便找资源,不能随便说话,我要告诉你们资源在哪。基站告诉每辆车你在什么时候,什么地方说什么话,这样的好处是移动运营商和基站厂商能够全程控制这件事。但是车企就不干了,如果在这种情况下车撞上了,设备上肯不肯承担责任,这个问题就值得商榷了。
最后,做终端出身的高通和车企达成了共识,我们希望走模式4,这是三种模式。一去,一跟,一定要问清楚是谁,在一段时间内,业界还不够统一,各有各的优势。两个产业要讨论,要找到一个中间路线,到底往哪走,这是当前业界争论非常大的一点。我们高通认为应该直接走向模式4,同时我们会增加入口,解决一些远距离,云端,非实时沟通的模式。
模式4,自主资源选择。我是选择干扰最少的资源来使用,我不承诺不对别人有干扰,但是我保证把干扰做到最小,这样的好处是什么?总能找到资源把我的话说出来,每个人都说肯定彼此有干扰。但是我只要想办法,找到离我最近的人,用需要的音量把话说出来就好了。
而集中调度未必能找到这样的资源,你把谁扔了,可能对方都不干。另外,定时同步,频段,全球性的频段,但是两边一边留了20,一边留了30,进可攻,退可守。中国是5905和5925,有了这个频率之后,今年大家可以看到很多现场测试的情况。
最终给用户看到的不是通信怎么样,用户是说这些钱放在这可靠不可靠,能不能自动刹车。应用层的应用,车企已经开始开发了,所以我们要保证这些有的基础不要被放弃掉,所以我们做标准的时候一刀切开。有人问到底11p老在哪?到底C-V2X改进在哪?

第一点,传输时间,我们大家知道,如果我要让别人知道一件事情的话,这是能量的传递。为了传递一个消息,就需要这么多能量,你要少了大家就听不到。学过物理的人都知道,能量是什么?不仅涉及到法规的问题,还有传多远呢?这就变成时间的问题了。所以11p犯了一个很大的问题,就是把所有10兆带宽都拿来传,但是传不完。
我们看到这个问题,第一点要拓展距离,我们把时间加大,两毫秒的传输。虽然看起来比11p大了很多,但是好处是可靠性增加了几倍。我们要提供6倍能量,几百微秒和2毫秒对车企的应用不是那么敏感。真正传输时延不是说你传了多长时间,而是等待的时间最长。不要把时间优化在传输时间上,我要时间花在资源调度上。
11p用的是OFDM传输方式,信道编码很重要,11p用的是卷积码,但是也很差。到了LTE的时候,用的是turbo码,当你把这个加在一起的时候,11p会比C-V2X差12个TB,距离是2倍。当你有些具体工况场景需要安全距离很长的时候,那就不可靠。11p最开始测试的时候,最开始就想测这个场景,这个场景距离要求特别高,而这个弯道提示也是这样,弯道的时候11p看到的功率距离就比较短。
这是一个弯道,里面有一个故障车,你进弯道之前看不到这个车,它停在路上,你要想预警,就需要一个广播。如果你开得越快,你的刹车时间就越长,你需要获得通知的提前量就会越远。
现在是11p的工作距离只有60公里。当你70公里的速度进来的时候还可以提前获得预警,当我接到预警就刹车还不会撞,但是你更高速度进来,我保证你能撞上,因为你肯定停不下来,高速公路这种情况,开到70公里以上很多。所以这个就不可靠。
这是一个借道超车的提示,经常出事。这个距离决定是啥?大车走的是快还是慢,如果走得很慢,很容易超过他,安全距离很小。但是如果这个车超过70公里,很快,你要想超他,超车距离更长。11p这个车速只能大概40公里或者50公里,但是这个用了V2X可以到70公里以上。
这个事看起来不是特别遥远,高通今年推出的芯片,就是支持C-V2X的CP5,模式4的功能。这个芯片会在明年四季度量产,交给车企使用。为了支持这件事,高通也推出了一个参考设计,包括9150还有安全模块等,在我们国家说得少,在欧美说得比较多一点。
